據悉,在過去一周使用的名稱包括 Bald_Face_Mountain、Little_Devil_Stairs、Sunset_Hill、Luck_Hollow和Moody_Creek。“毅力號”在5月15日至21日的一周內記錄了近400米的行駛進度,截至第446太陽日,自著陸以來的總距離超過11.8公里。
在另一個首次中,“毅力號”在第442太陽日選擇了兩個目標,并用SuperCam激光器拍攝它們以確定它們的元素組成。值得注意的是,挑選目標的是漫游車本身而非操作團隊。通常情況下,當漫游者團隊挑選目標時,直到第二天才會進行觀測。如果“毅力號”自己挑選目標,那么它可以在行駛后立即進行拍攝,在回到地球的漫游者團隊有時間接收和分析來自漫游者新位置的Navcam圖像并選擇目標之前的許多小時。
立即獲得SuperCam的結果可以提醒團隊注意不尋常的構成以便在漫游車繼續前進之前作出進一步分析的決定。實現這種目標選擇的軟件包被稱為Autonomous Exploration for Gathering Increased Science(AEGIS),它是由JPL為以前的漫游任務開發的并適用于“毅力號”的SuperCam。
AEGIS要求拍攝Navcam圖像,然后它會分析圖像來找到巖石,另外還能根據大小、亮度和其他一些特征對它們進行優先分析。隨后,它啟動了一個序列,在這個序列中,SuperCam發射其激光以確定從Navcam圖像中選出的一個或兩個最優先目標的化學構成。
AEGIS在“毅力號”上的測試于3月開始,其通過收集SuperCam遠程微型成像儀(RMI)圖像展開,但不發射激光。在連續的測試中調整幾個參數后,AEGIS于上周首次使用了激光。隨附的圖像顯示了被選擇和拍攝的巖石。激光射擊后拍攝了RMI圖像以顯示激光的發射位置。“毅力號”團隊計劃從現在開始經常使用AEGIS來提供關于漫游車路徑周圍巖石成分的更快速數據。
-
中石化、華潤等3戶中央企業總經理任職
頭條 22-06-07
-
鄭州掛牌出讓4876平方米零售商業用地,起始價8129萬元
頭條 22-06-07
-
河南省昨日無新增本土確診病例、無癥狀感染者
頭條 22-06-07
-
高考期間,鄭州限行車輛憑送考車貼不予處罰
頭條 22-06-07
-
隔夜歐美·6月7日
頭條 22-06-07
-
河南印發最新規劃,建設具有國際影響力的鄭州國家商貿流通中心
頭條 22-06-07
-
名品彩葉等十家公司被紀律處分
頭條 22-06-07
-
鄭州煤電:控股股東擬轉讓5.74%股份予中豫信增
頭條 22-06-07
-
立方風控鳥·晚報(6月6日)
頭條 22-06-07
-
中國保險行業協會:2021年我國銀保業務保持健康平穩發展態勢
頭條 22-06-07
-
京東押注預制菜賽道:6項舉措扶持20個銷售過億元品牌
頭條 22-06-07
-
1186家!河南擬認定2022年省級“專精特新”中小企業| 名單
頭條 22-06-06
-
中原銀行擬發行20億元小微企業貸款專項金融債 利率2.50%~3.50%
頭條 22-06-06
-
總投資63.56億元!湖北隨州至信陽高速公路項目獲批
頭條 22-06-06
-
河南完成發放首批18.3億元實際種糧農民一次性補貼
頭條 22-06-06
-
濮陽市政府與海德利森簽約 就氫能項目建設開展戰略合作
頭條 22-06-06
-
投資30億元,商丘將建機器人產業園
頭條 22-06-06
-
河南證監局在線舉辦轄區私募機構合規培訓會,161家機構參會
頭條 22-06-06
-
以案說法|購房貸款未獲批,開發商是否需退首付款?
頭條 22-05-25
-
鄭州市2022年度第一批672家入庫科技型企業 | 名單
頭條 22-05-25
-
解封!許昌最新通告:有序恢復中心城區正常生產生活秩序
頭條 22-05-25
-
明星退股,鄭州“賢合莊”還好嗎?
頭條 22-05-25
-
總投資約801億元!溫武吉鐵路預計明年開建
頭條 22-05-25
-
上海返豫大學生在鄭隔離全免費
頭條 22-05-23
-
鄭州:高層次人才可為子女申請入學照顧資格
頭條 22-05-23
-
起始價5628萬元!新鄭市擬出讓4宗167.96畝工業用地
頭條 22-05-23
-
何雄會見廣東產融控股董事長徐勝廣,加強產業投資、招商引資等領域合作
頭條 22-05-23
-
皮海洲:政策紓困,不妨考慮給投資者一些實際利益
頭條 22-05-23
-
安偉:努力讓廣大豫籍學子高興入鄭、滿意住下、愉快返鄉
頭條 22-05-23
-
明起兩天一次核酸檢測!周口一地通告
頭條 22-05-23
-
總投資120億元!全球最大的聯堿和氯化銨生產基地落戶漯河
頭條 22-05-23
-
許昌通報2例確診病例和5例無癥狀感染者活動軌跡
頭條 22-05-23
-
鄭州新增2例確診病例和6例無癥狀感染者 活動軌跡公布
頭條 22-05-23
-
多家機構將刪除金融產品名稱中使用的“雪球”字樣
頭條 22-05-23
-
武漢經開區刪除“全面取消住房限購政策”官微
頭條 22-05-22
-
河南省副省長費東斌到南陽市內鄉縣、西峽縣和洛陽市欒川縣調研
頭條 22-05-22
-
劉建中、孫鴻俊當選為周口市第四屆人民代表大會常務委員會副主任
頭條 22-05-22
-
小滿廣告文案被指抄襲,奧迪致歉
頭條 22-05-22
-
河南昨日新增本土確診病例3例,新增本土無癥狀感染者15例
頭條 22-05-22
-
國家衛健委:昨日新增本土確診157例,新增本土無癥狀感染者667例
頭條 22-05-22
-
武漢經開區全面取消住房限購政策
頭條 22-05-22
-
安偉:加快建設“15分鐘核酸檢測圈”,確保月底前在主城區等地建成投用
頭條 22-05-22
-
鄭州278家企業滿負荷生產獲財政3160萬元獎勵
頭條 22-05-22
-
河南省委召開新冠肺炎疫情防控工作第十八次專題會議
頭條 22-05-22
-
最新!周口市商水縣通報1例無癥狀感染者情況
頭條 22-05-22
-
鮮花蛋糕訂單大幅增長,5·20網絡情人節催熱同城即時配送
頭條 22-05-22
-
深圳國資入主!許昌鮮易供應鏈等15家公司破產重整項目落地
頭條 22-05-22
-
許昌通報2例確診病例、6例無癥狀感染者活動軌跡
頭條 22-05-22
-
鄭州發布104號通告,對部分封控區、管控區進行調整
頭條 22-05-22
-
國家稅務總局發布軟件企業和集成電路企業稅費優惠政策指引
頭條 22-05-21
-
國家稅務總局發布支持鄉村振興稅費優惠政策指引
頭條 22-05-21
-
許昌發布49號通告:今日14時調整中心城區封控管控區域
頭條 22-05-21
-
天津新政:首套房公積金貸款最高限額上調至80萬元
頭條 22-05-21
-
時隔4個月LPR再次下調,這釋放出哪些信號?
頭條 22-05-21
-
董事長被公司內部處罰通報,四連板行情難掩企業一籮筐利空
頭條 22-05-21






















































































- NASA“毅力號”現在可以自己選擇探測目標2022-06-07
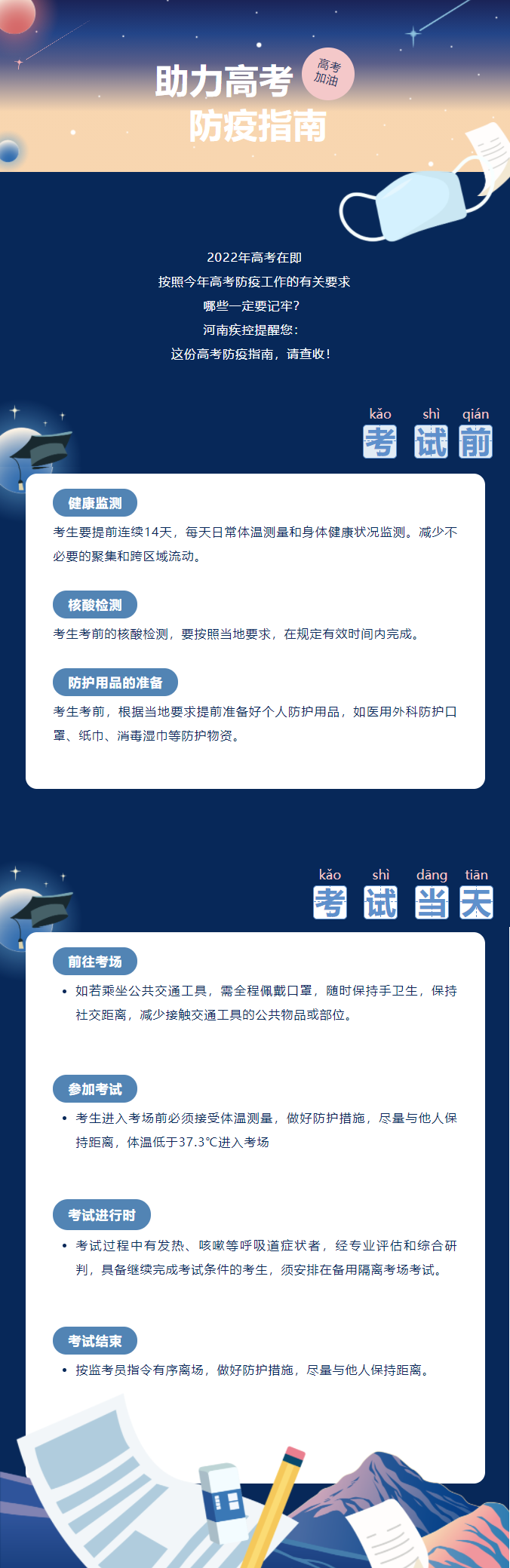
- 圖集 | 加油,孩子!2022年高考今日開考2022-06-07
- 上海交大科學家領銜提出求解三體問題周期解2022-06-07
- 浙江昨日新增本土無癥狀感染者1例,在嘉興2022-06-07
- 廣西梧州海事部門積極應對今年首次超警洪水2022-06-07
- 端穩油瓶子 穩住豆袋子 黑土地上打響大豆2022-06-07
- 湖南:2100多萬畝油菜喜獲豐收2022-06-07
- 加油吧,少年!2022-06-07
- Dior首款實物交割數字藏品即將登錄合自文創2022-06-07
- 《深圳市培育發展工業母機產業集群行動計劃2022-06-07
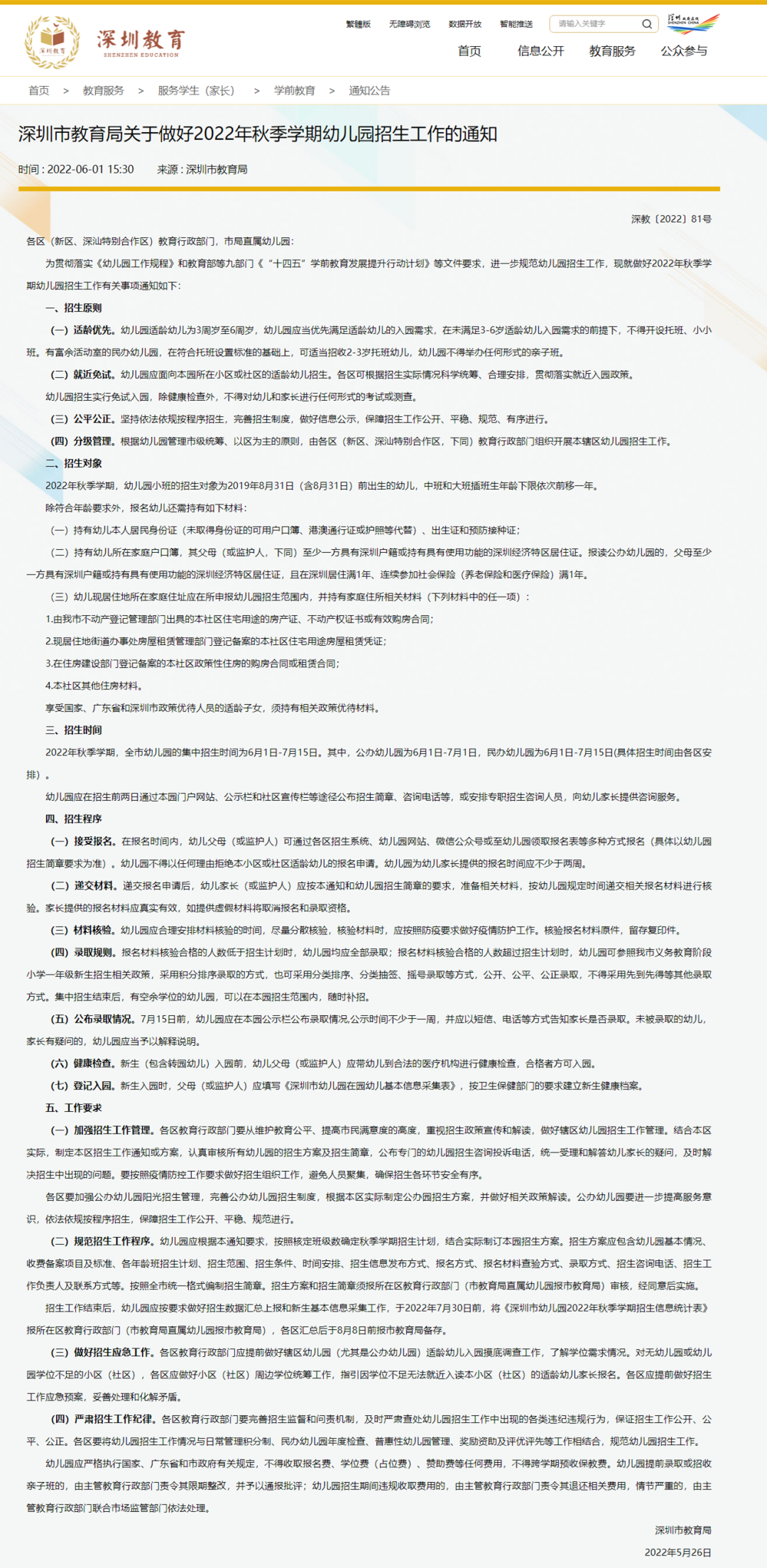
- 2022年深圳幼兒園招生安排出爐!招生實行免2022-06-07
- 2022年深圳幼兒園招生安排出爐!招生實行免2022-06-07
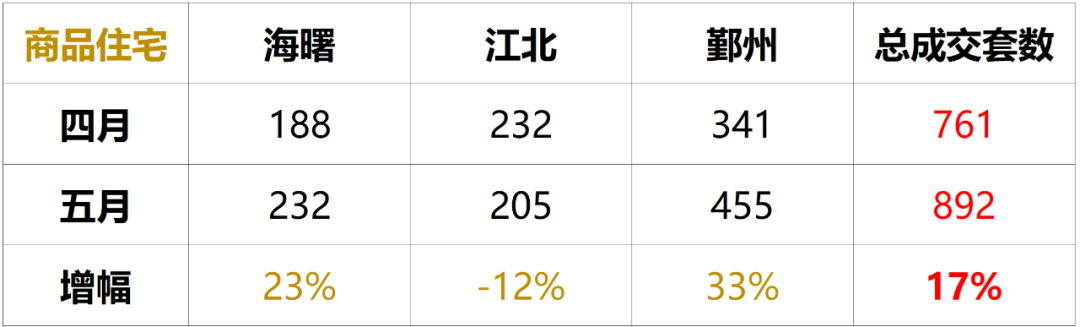
- 寧波樓市“主力”區域新房成交量回升 二手2022-06-07
- 寧波樓市“主力”區域新房成交量回升 二手2022-06-07
- 教育部四舉措加強核查高校畢業生就業數據 2022-06-07
- 教育部四舉措加強核查高校畢業生就業數據 2022-06-07
- 故宮將于6月7日起按照75%限流要求恢復開放2022-06-07
- 提前出門關注交通變化!今天起青島部分路段2022-06-07
- 國內首個!青島智造核酸采樣艙標準出臺 填2022-06-07
- 廈門市醫保局發布通知:22個行業可緩繳企業2022-06-07
- 廈門市交通運輸局:開展物流扶持資金申報受2022-06-07
- 福建12部門發布最新校外培訓機構整治方案2022-06-07
- 福建12部門發布最新校外培訓機構整治方案2022-06-07
- 福建省2022年“三支一扶”計劃招募1008人 2022-06-07
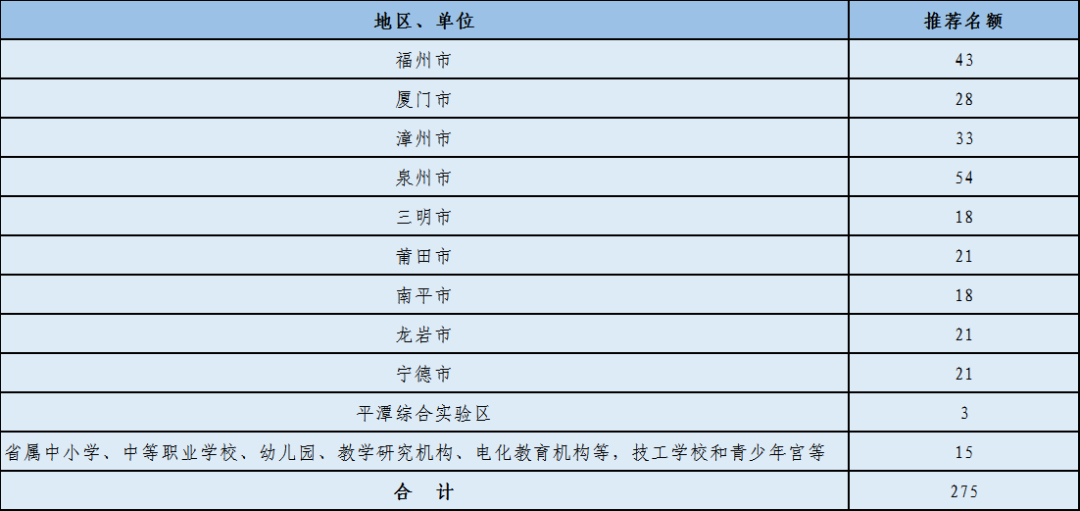
- 2022年福建省特級教師評選開始啦 各地推薦2022-06-07
- 浙江省發布15條加強自然資源要素保障助力穩2022-06-07
- 浙江省高考今起開考 全省共設81個考區1.22022-06-07
- 浙江省高考今起開考 全省共設81個考區1.22022-06-07
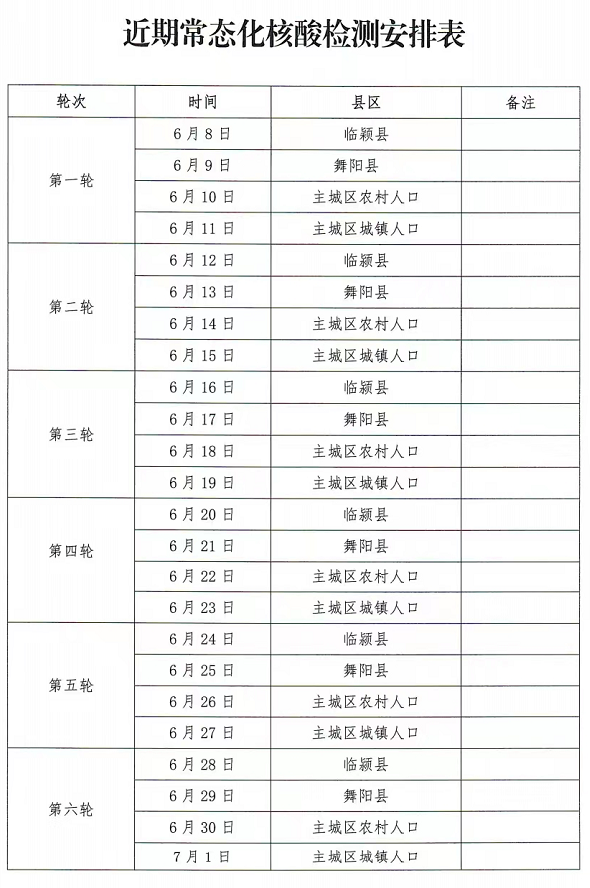
- 漯河常態化核酸檢測最新安排 分縣區每間隔2022-06-07
- 商丘提高住房公積金提取額度 還可申請緩繳2022-06-07














